机械安装说明
本说明书介绍如何构建大学生第一台MP-0。本产品使用的麦克纳姆轮是一种特殊的全向轮,能够实现小车在任何方向上的平稳移动。选用的JGB37-520减速电机则是一款高性能、低噪音的直流减速电机,适用于各种轻型移动平台。
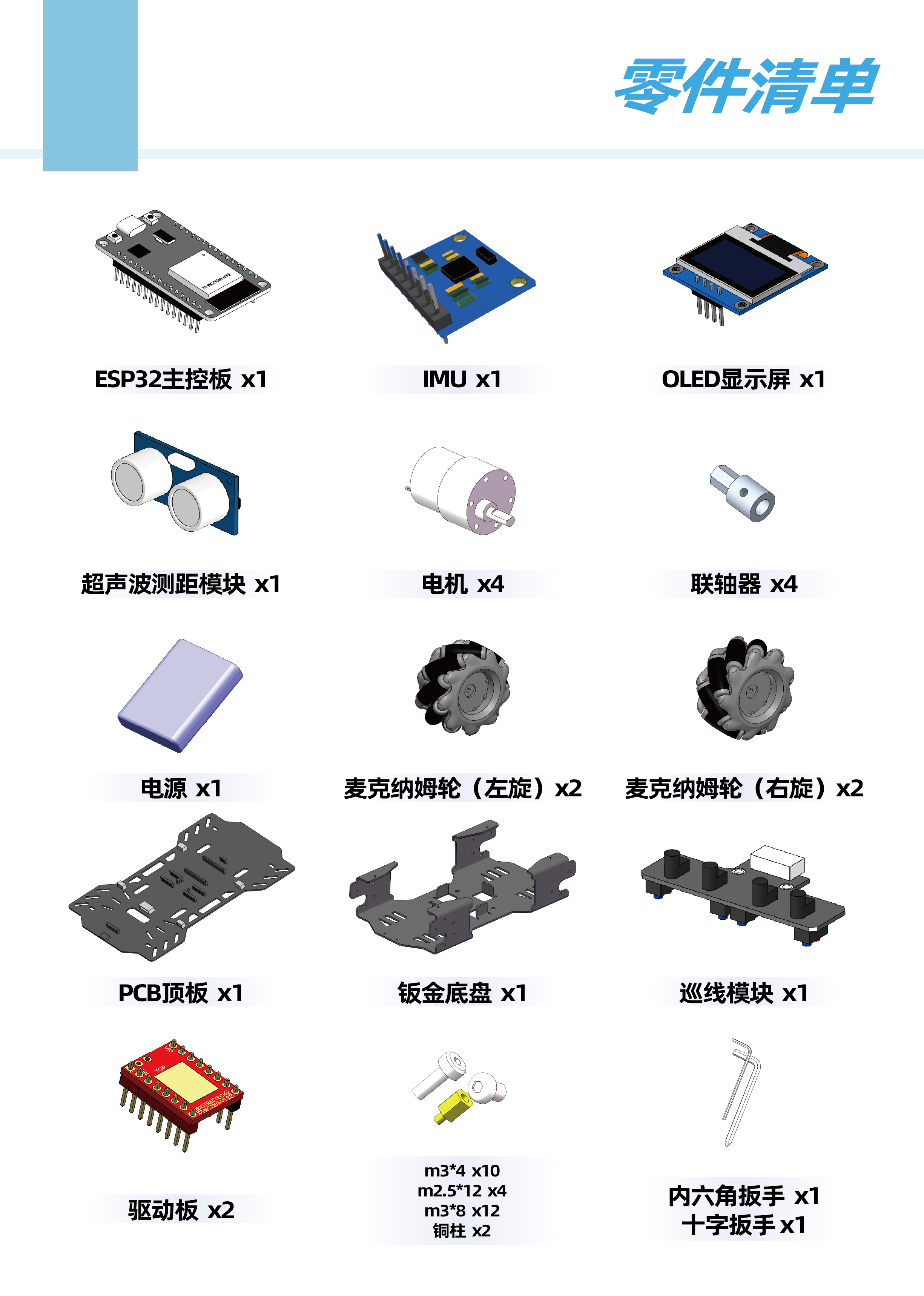
材料清单
JGB37-520减速电机 × 4(已安装xh2.54端子)
麦克纳姆轮 × 4
钣金底盘 × 1
上层PCB板 × 1
电池盒 × 1
M3*4圆头螺栓 × 10
M3*8圆头螺栓 × 12
超声波测距模块 × 1
陀螺仪模块 × 1
电机驱动模块 × 1
ESP32主控板 × 1
OLED显示屏 × 1
巡线模块 × 1
螺丝刀、扳手等基本工具
组装步骤
1. 准备工具和材料
确保所有必要的工具和材料已备齐。
注意
螺栓选择正确型号,组装过程严格按照说明书的顺序。
2. 底盘安装
采用钣金底盘作为麦克纳姆轮四驱小车的底盘,确保底盘有足够的空间容纳电池、电子元件和电机。
注意
钣金底盘的攻丝孔因为工艺特点,可能出现难以旋进的问题,用户可反复松拧,直至顺畅,但是禁止暴力安装。
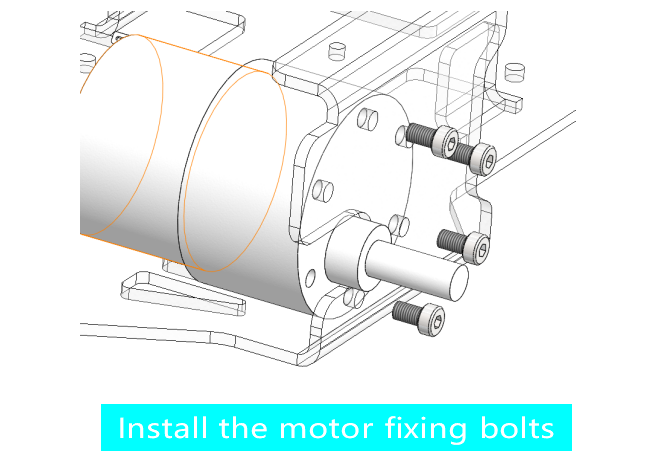
3. 安装电机
将JGB37-520减速电机分别安装在底盘的四个角上,使用M3*8圆头螺栓将电机固定在底盘上(M3*8圆头螺栓代表螺纹外径为3mm,螺纹长度8mm的内六角螺栓,使用产品提供的六角扳手安装)。确保电机轴向外延伸,方便安装联轴器。
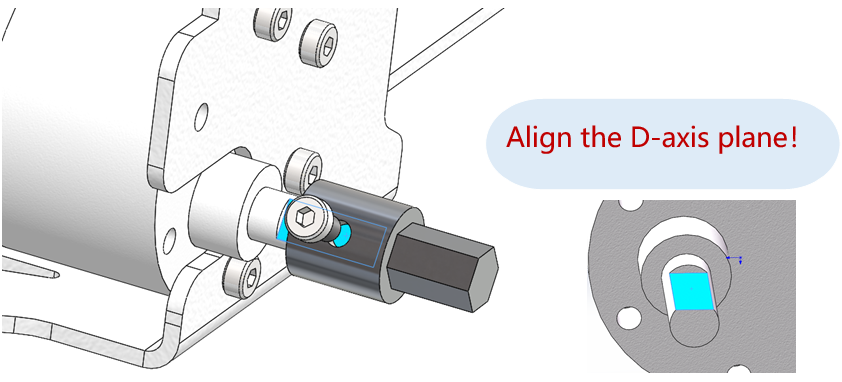
4. 安装联轴器
将联轴器与电机轴连接,使用M3*4(外径为3mm,螺纹长度4mm)圆头螺栓固定,确保螺栓顶在电机轴的D形平面上。
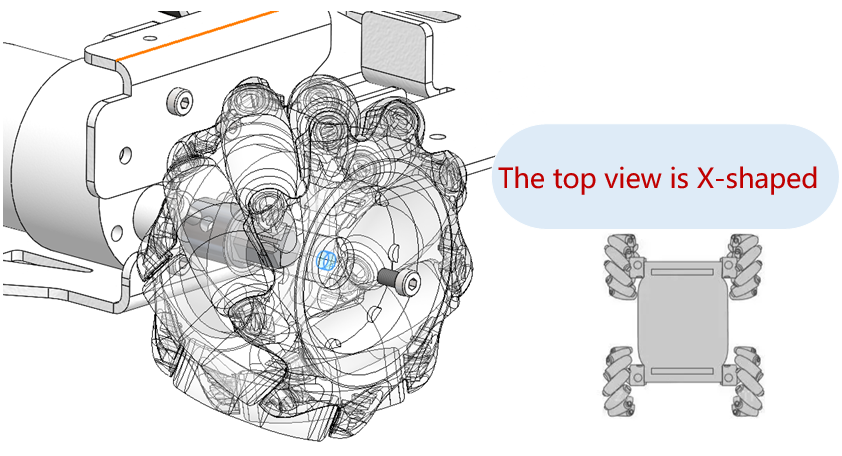
5. 安装麦克纳姆轮
将麦克纳姆轮与联轴器连接,使用M2.5*12杯头螺栓(外径为2.5mm,螺纹长度12mm)固定。注意确保轮子间的角度关系正确,轮胎的滚子应呈45°角排列,机器人上视图视角中,麦克纳姆轮辊子应呈X形。安装完毕后检查麦克纳姆轮是否能顺畅旋转。
4. 安装巡线模块
先将铜柱安装在底盘上,再使用M3*4螺栓将巡线模块固定在铜柱上。
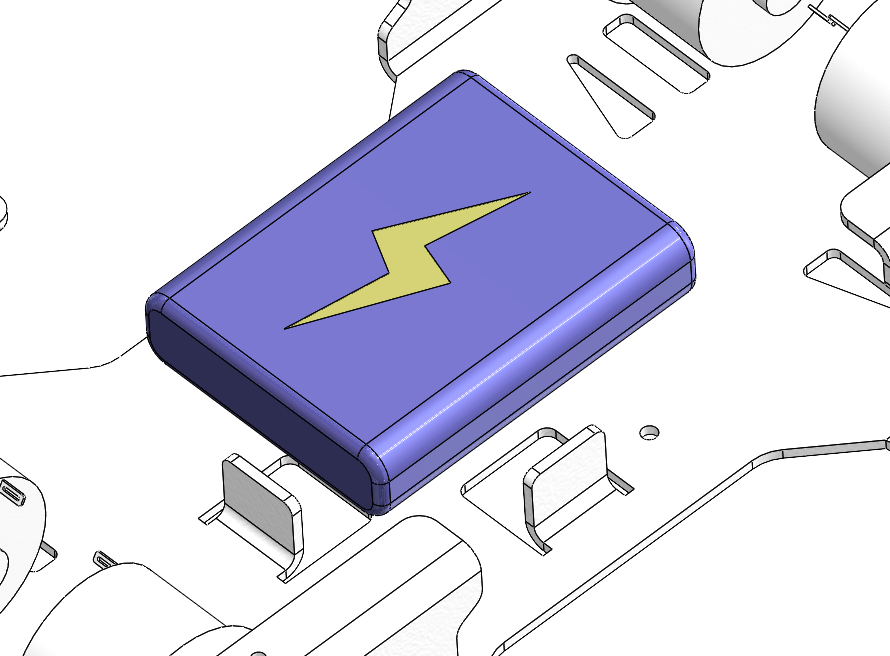
7. 安装电池
选择底盘中间的位置将电池安装在底盘上,使用扎带固定电源主体和充电接口。
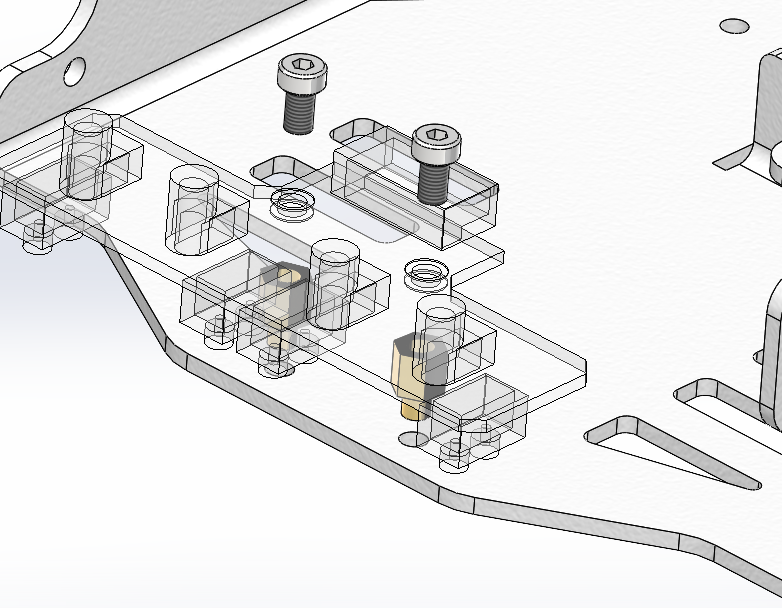
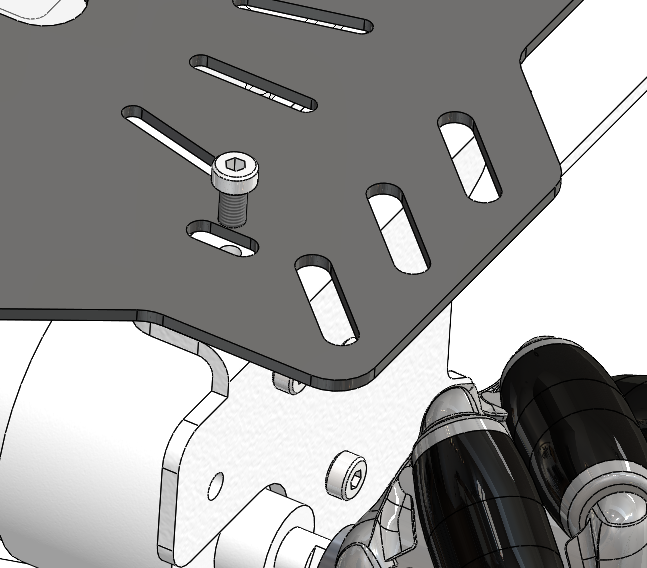
8. 安装PCB板
将PCB板用4个M3*4圆头螺栓固定在底盘上,确保电子元件与电机的连接顺畅。安装时优先选择对角连接,采取先预固定,后拧紧的方式。
注意
PCB板安装到底盘上时,先安装对角孔位,预固定后将所有螺栓全部安装后再统一拧紧。
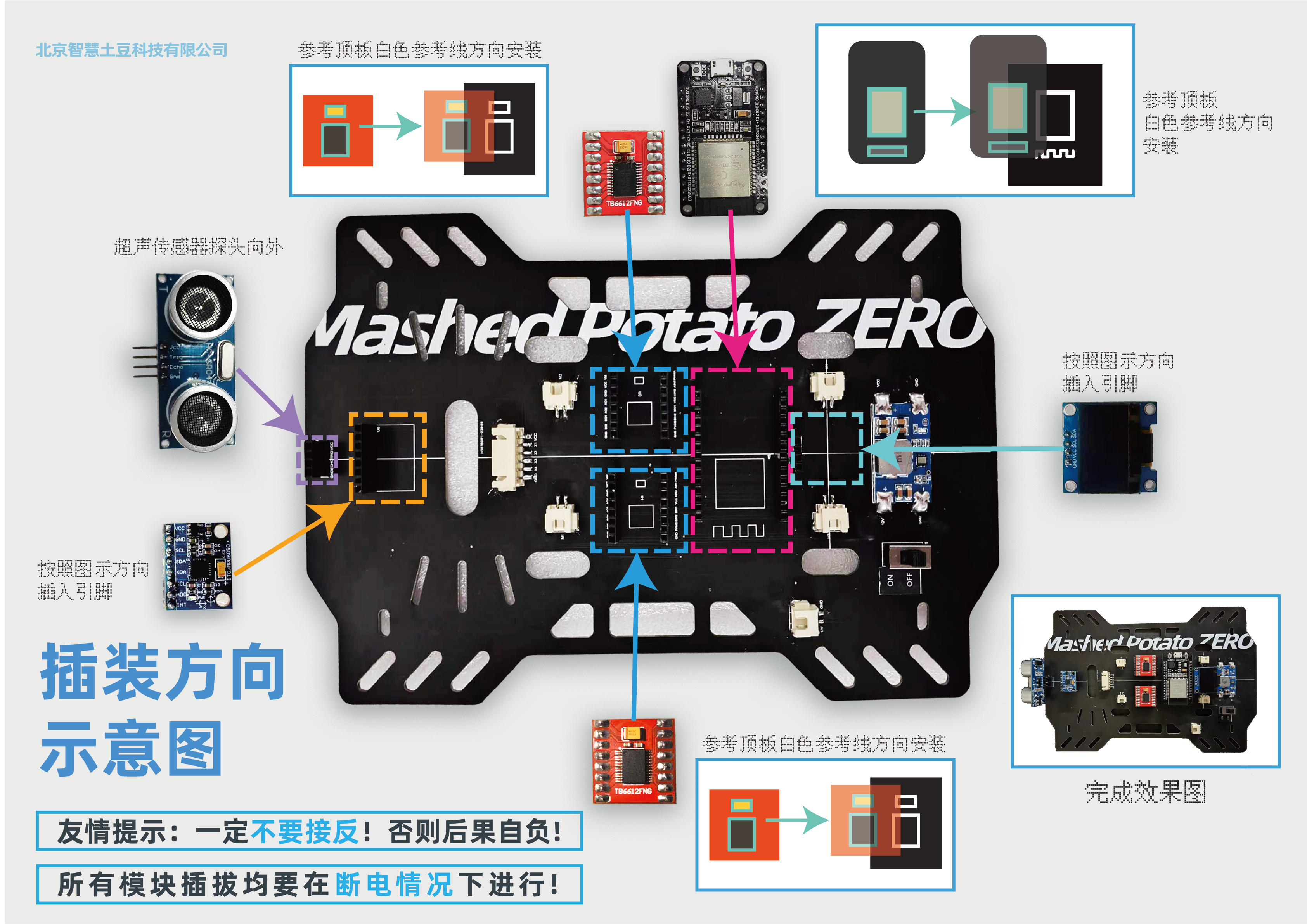
9. 安装PCB板上的模块
参照顶板图案提示和模块各引脚的对应关系,将超声波测距模块、陀螺仪模块、电机驱动模块、ESP32主控板和OLED显示屏按照预留位置安装在PCB板上。
注意
务必注意模块安装方向,若反接可能会导致模块损坏。
10. 连接线缆
将电机的xh2.54端子引出,穿过PCB板的孔位中并连接在PCB板的上层接口上,接口与电机的连接遵循就近原则,注意不要接错。同理将巡线模块和电源的线缆引出到顶板并安装在对应接口上。
注意事项
注意
在使用过程中,请定期检查螺丝紧固情况以及电机、轮子等部件的磨损情况,以确保小车正常运行。